我的T265 win10上手操作
本文共 473 字,大约阅读时间需要 1 分钟。
我的T265 win10上手操作
今天T265到手了,(感觉应该之前被别人拆过用过)


再放几张照片,确实揭开膜之后还是很漂亮的


我决定先在win10上玩玩
先按这个教程弄
按教程说的
进这个页面
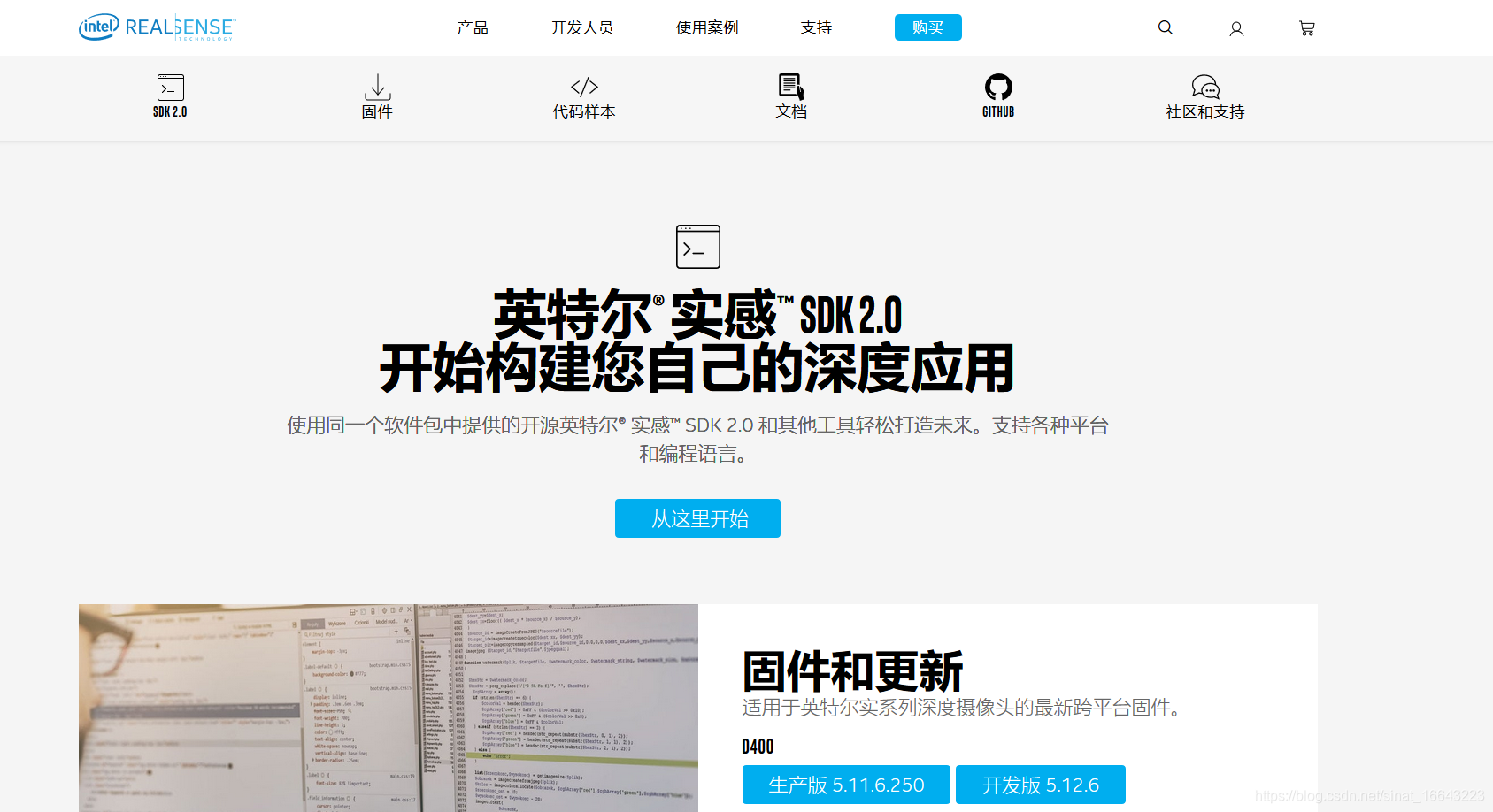
然后我点了SDK2.0
跳到这个页面,它直接显示的就是windows的,然后直接点击下载。

似乎应该下载的是这个

连家里wifi下载速度很慢,连手机热点下就很快了!!!!
下载好后直接双击exe文件,都不用安装就出现了
插上T265的USB到电脑后会立即识别到
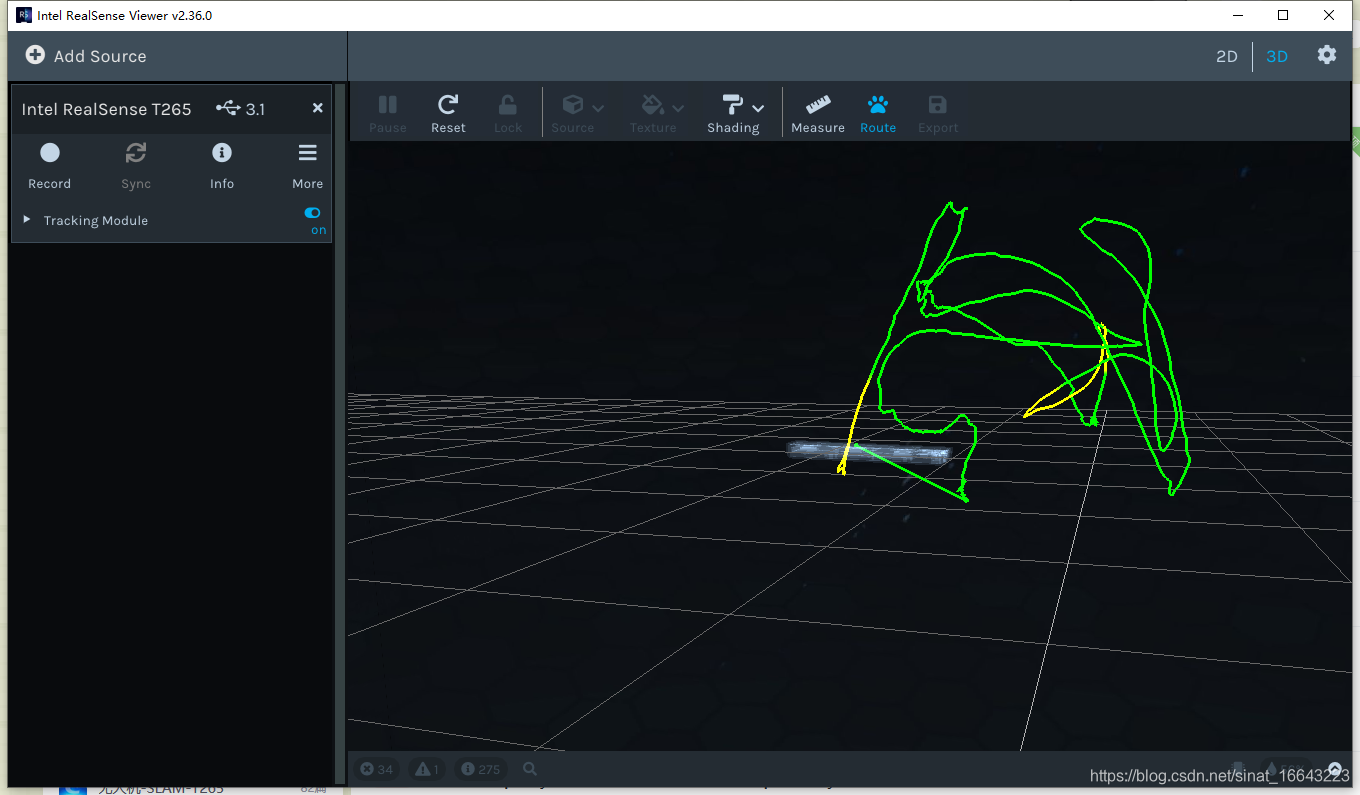
然后把左上角那个红色的off点成绿的的on ,你就可以移动摄像头看到轨迹了
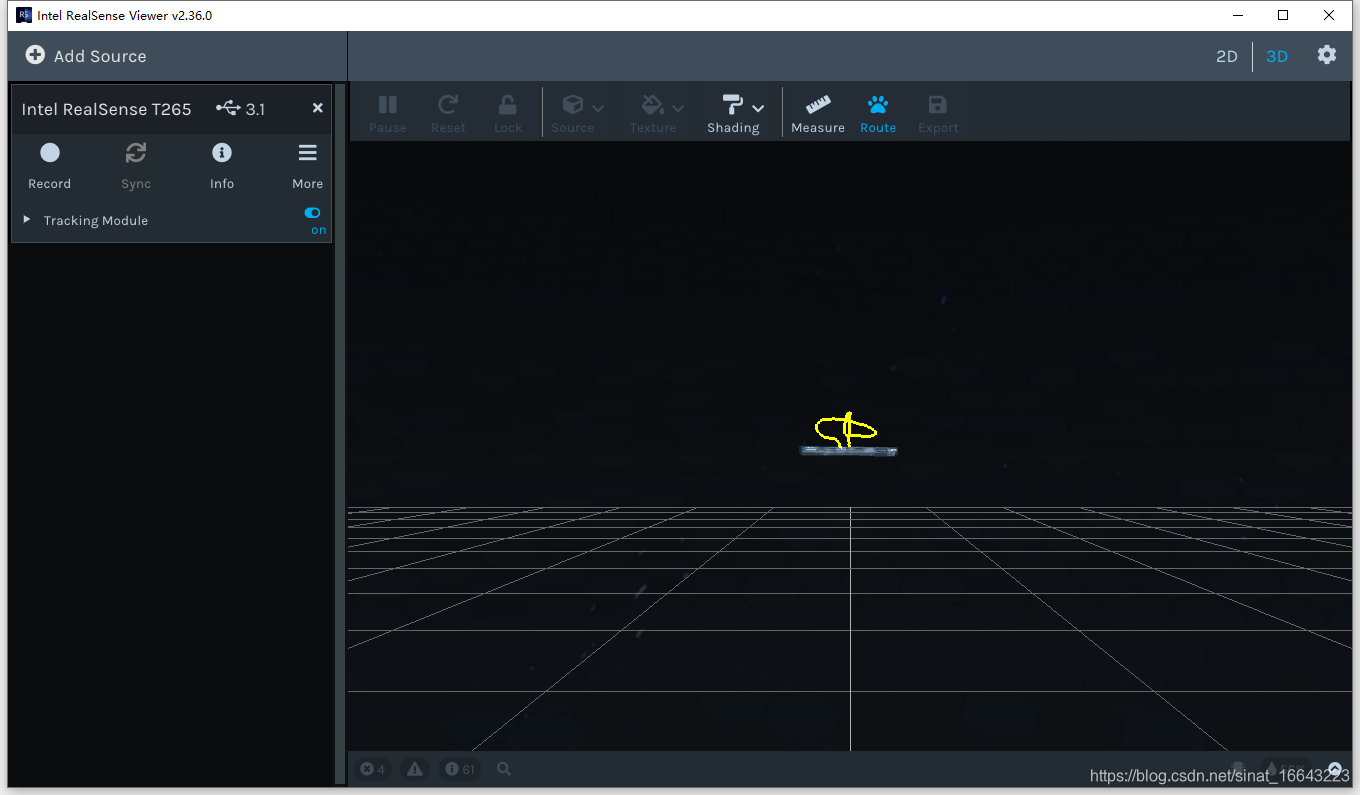
确实中途有一次看到它回环检测了。
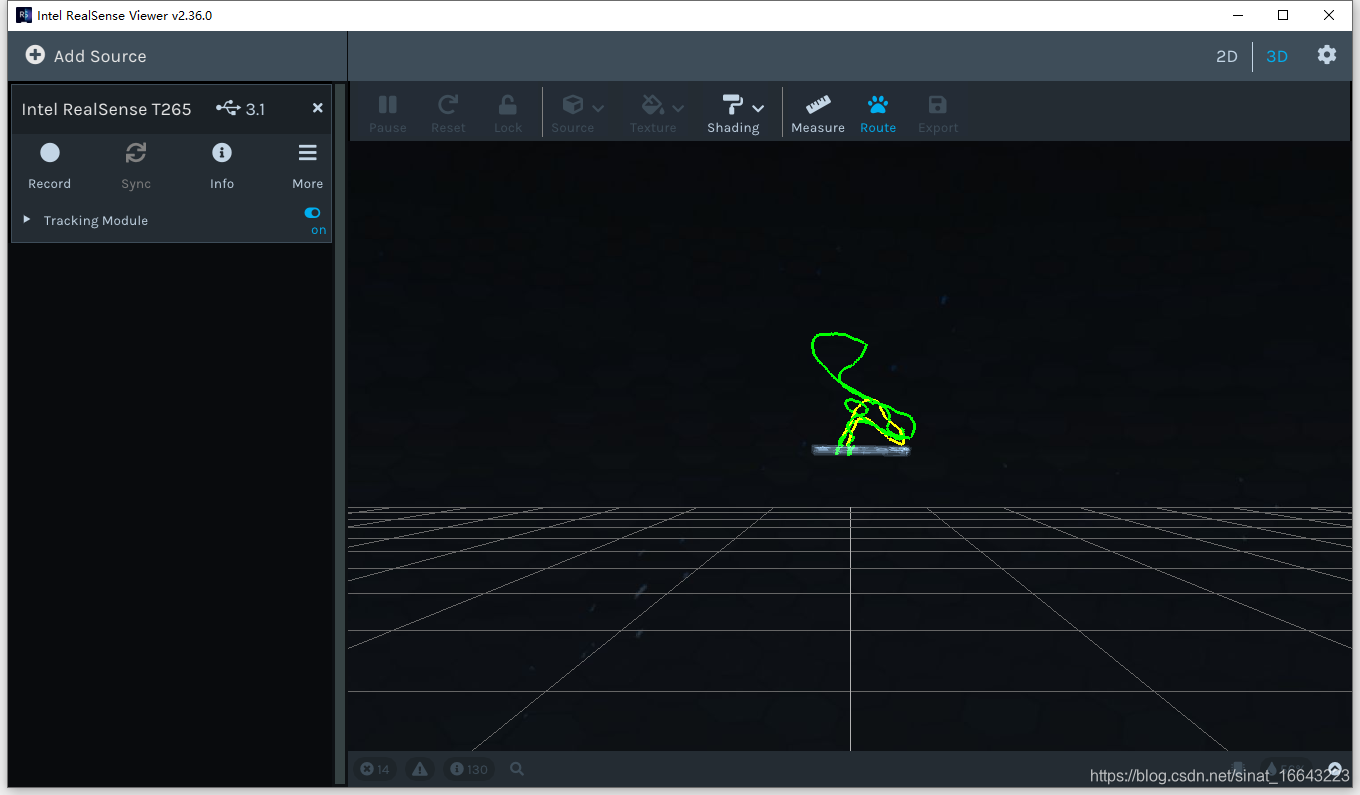
它的运动轨迹你是可以360*360旋转观看的。
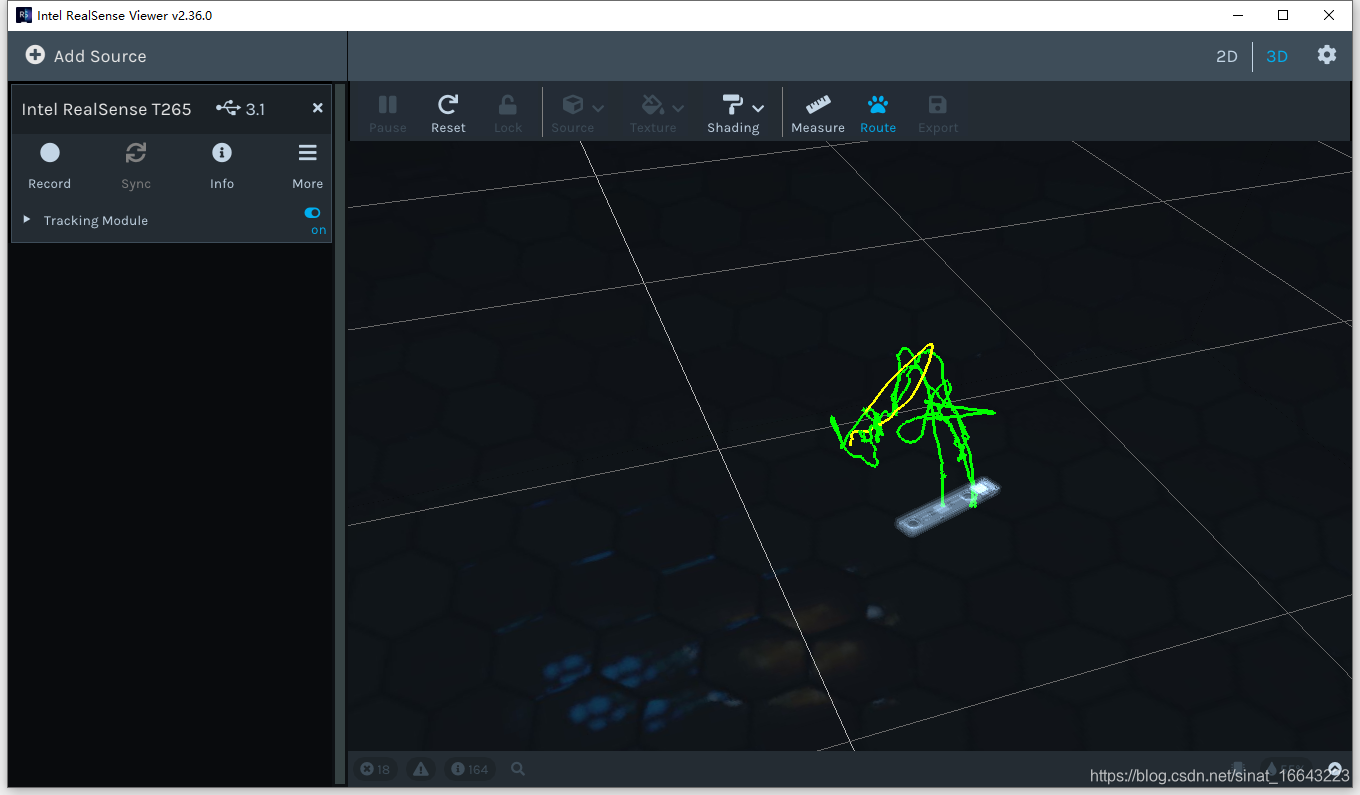
这就是一个回环,我放回原处的时候,它有个跳变,它识别到了那是最开始的地方,一下子跳回去了。
但是我发现一点就是它的USB连接似乎容易断开,稍微有些接触不良就断开了?
这样在无人机的高频震动下会不会有问题?
我发现问题了,每次断开都是你没动它静止不动的时候它断开,你动T265的时候它是不会断开的,可能是它自动检测到的?自动断开的?
转载地址:http://gblni.baihongyu.com/
你可能感兴趣的文章
pixhawk(PX4)的一些论坛网站(包括中文版的PX4用户手册和PX4开发手册)
查看>>
串级 PID 为什么外环输出是内环的期望?(和我之前对串级PID的总结一样)
查看>>
我刚刚才完全清楚GPS模块的那根杆子是怎么固定安装好的
查看>>
去github里面找找也没有别人无人机+SLAM的工程
查看>>
PX4与ROS关系以及仿真控制(键盘控制无人机)
查看>>
我对无人机重心高度的理解
查看>>
现在明白为什么无名博客里好几篇文章在讲传感器的滞后
查看>>
实际我看Pixhawk定高模式其实也是飞得很稳,飘得也不厉害
查看>>
Pixhawk解锁常见错误
查看>>
C++的模板化等等的确实比C用起来方便多了
查看>>
ROS是不是可以理解成一个虚拟机,就是操作系统之上的操作系统
查看>>
用STL algorithm轻松解决几道算法面试题
查看>>
ACfly之所以不怕炸机因为它觉得某个传感器数据不安全就立马不用了
查看>>
我发觉,不管是弄ROS OPENCV T265二次开发 SDK开发 caffe PX4 都是用的C++
查看>>
ROS的安装(包含文字和视频教程,我的ROS安装教程以这篇为准)
查看>>
国内有个码云,gitee
查看>>
原来我之前一直用的APM固件....现在很多东西明白了。
查看>>
realsense-ros里里程计相关代码
查看>>
似乎写个ROS功能包并不难,你会订阅话题发布话题,加点逻辑处理,就可以写一些基础的ROS功能包了。
查看>>
if __name__ == ‘__main__‘:就是Python里的main函数,脚本从这里开始执行,如果没有main函数则从上到下顺序执行。
查看>>